
Robote možemo podeliti na više načina, zavisno od kriterijuma podele. Ako posmatramo generacijsku podelu robota, razlikujemo:
Prva generacija – programski roboti. To su u stvari automatizovane mašine i ne predstavljaju robote u pravom smislu reči. Oni samo izvrsavaju unapred definisane operacije redom, jednu po jednu, bez mogućnosti izmena u hodu.
Druga generacija – adaptivni roboti. Već mali napredak u automatizaciji procesa. Roboti izvrsavaju programirane zadatke, ali uz mogućnost modifikacije (adaptacije na promene u samom procesu). Adaptacija na promenu uslova se vrši po principu povratne sprege. Robot izvršava zadatke na osnovu referentnih vrednosti, istovremeno očitava senzorima stanje i ako postoji odstupanje stvarnog stanja od referentnog, vrsi korekciju.
Treća generacija – inteligentni roboti. U stanju su da predvide promene u procesu proizvodnje na osnovu analize statističkih podataka i preventivno vrše korekcije da ne bi došlo do zastoja. Velika primena u preventivnom održavanju i kontroli kvaliteta.
Četvrta generacija – svesni roboti. Srećom, još uvek u domenu naučne fantastike. Pretpostavka je da će u nekom trenutku roboti postati svesni sebe i svoje uloge u procesu proizvodnje i u svetu uopšte.
Prema složenosti zadataka koje roboti obavjaju, možemo ih podeliti na nivoe
Nizak – jednostavne operacije kao što je farbanje, lepljenje… Tu se uglavnom radi o jednoličnim operacijama koje se ponavljaju. Robot izvršava samo 2 operacije – uključi alat i isključi alat, sa pomerajima izmedju pozicija.
Niži srednji – premeštanje predmeta sa jedne pozicije na drugu, crtanje… Najčešći primer jednostavne manipulacije predmetom. Na primer, ruka robota se pozicionira iznad predmeta, šaka hvata predmet, premešta ga na drugu poziciju i šaka otpušta predmet. Pokreti su strogo linearni ili strogo krivolinijski.
Srednji – složenije rukovanje materijalom, bušenje, zavrtanje… Pokreti robota su kompleksniji jer istovremeno vrši i rotaciju i translaciju.
Viši srednji – umetanje komponenata u sklop, CNC obrada… Skup senzora kontroliše operaciju u svakoj tački. Naročito bitno kod pozicioniranja dela u sastavu nekog sklopa.
Visok - složene montaže, precizna inspekcija. Višestruke pozicije kompleksne montaže sklopa više komponenata. Sveobuhvatna inspekcija završenog proizvoda po više parametara. Neophodno učešće veštačke inteligencije.
Prema načinu primene robota razlikujemo:
Industrijske robote – roboti čvrste strukture sa višedimenzionalnom preciznošću. Koriste se u procesima proizvodnje i mogu biti manipulatori i alati. Roboti manipulatori vrše manipulaciju materijalom (donošenje obratka do mesta obrade, pridržavanje tokom obrade, premeštanje sa jedne pozicije na drugu, odlaganje nakon obrade), dok roboti alati vrše sve operacije
Servisne robote – obavljaju korisne zadatke za ljude i opremu ali ne u proizvodne svrhe ( čišćenje, dostava, socijalna podrška, medicinska asistencija…). Obuhvataju širok dijapazon potrošačkih robota (rumba usisivač, socijalni roboti za pomoć starijima) kao i profesionalnih robota (AGV roboti u logistici, roboti šankeri).

Edukacione robote – koriste se za učenje i istarživanje kao što je Lego, Thymio. Prvenstvena upotreba u nastavi kao uvod u oblast profesionalnih robota.

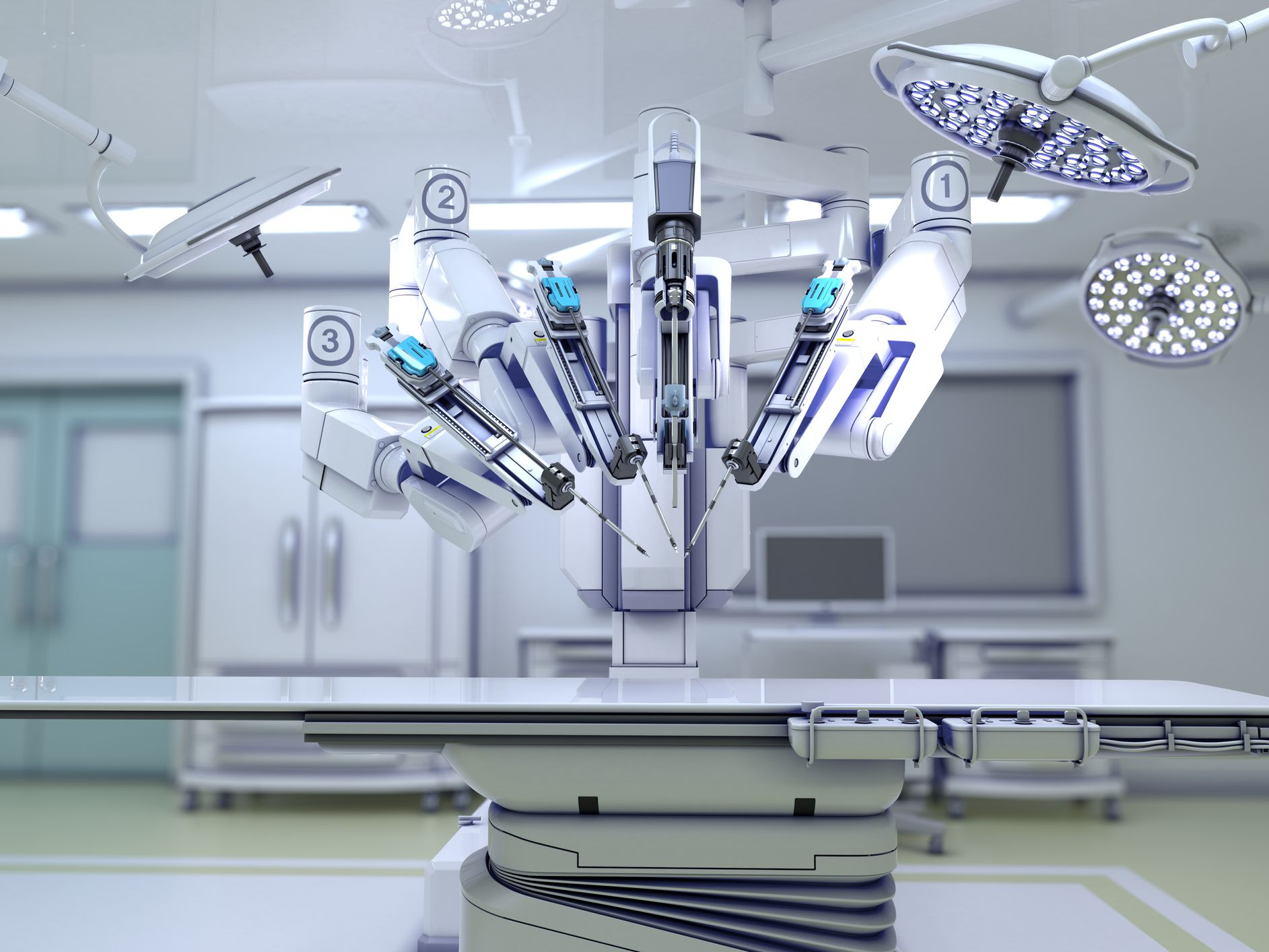
Medicinske robote – primena u hirurgiji i rehabilitaciji.
Industrijski roboti se u osnovi dele na autonomne i upravljane robote.
Autonomni roboti izvrsavaju unapred definisane zadatke samostalno (bez intervencije operatera). U toku procesa mogu (a i ne moraju) primenjivati osnovne logičke zaključke o daljim akcijama (primer robot usisivač koji menja smer kad naidje na prepreku) na osnovu informacija sa senzora i programirane logike, ali ipak – oni su u svom radu autonomni. Napisan program se izvršava bez ‘razmišljanja’ i samo prati logičke uslove ‘if...then...else…’.
Upravljani roboti izvršavaju operacije po principu povratne sprege izmedju senzora i upravljačke jedinice. O upravljanju robotima će biti reči naredne godine, ali za sada treba pomenuti načine upravjanja. Upravljanje može biti sekvencijalno i servo upravljanje. Sekvencijalno upravljanje podrazumeva ‘štelovanje’ operacija (upravljanje robotom) u delovima (sekvencijama) po tačkama ili po konturama. U tom slucaju, prati se položaj izvršnog uredjaja robota u svakoj tački ili duž konture koja je programirana, bez vodjenja računa šta se dešava izmedju tih definisanih, kontrolnih, pozicija. Servo upravljanje podrazumeva pracenje izvršnog uredjaja robota u svakoj poziciji operacije (čak i izmedju karakterističnih tačaka i kontura). Robot izvršava operacije vodeći se referentnim signalom, a senzorima očitava svoju poziciju u toku rada i šalje upravljačkoj jedinici. Upravljačka jedinica poredi referentno stanje sa stvarno očitanim stanjem i po potrebi koriguje signal koji šalje aktuatorima. Primer iz prakse najbolje opisuje tu situaciju kod je upravljanja vozilom. Krivina je ispred i mi okrećemo upravljač u smeru krivine. Svo vreme pratimo položaj vozila i dodatno podešavamo ugao skretanja. Ovo je složen model upravljanja jer omogućava korekcije putanja na osnovu promena u okruženju (detektovane senzorima).
Kada govorimo o nameni robota (naravno – indusrijskih), govorimo o cilju po kome je robot dizajniran. Specifični zadaci zahtevaju specifične konstrukcije industrijskih robota. Zbog toga razikujemo robote za zavarivanje, farbanje, montažu, premeštanje (manipiulaciju) predmeta, mobilne robote za skladištenje… Svaki od njih je posebno dizajniran da obavlja specifičnu operaciju, mada je (kao što ćemo videti u narednim poglavljima) tanka linija izmedju pojedinih namena, obzirom da je izvršni uredjaj industrijskog robota lako izmenljiv i samim tim se namena robota može menjati izmenom izvršnog uredjaja.