
Robot (od slovenskog – робота, работа – rad). Izraz „robot“ se prvi put pominje u drami Karela Čapeka „R.U.R.“ 1920. godine.
Robot je elektro-mehanička jedinica koja je u stanju da autonomno ili pod kontrolom čoveka izvodi određene zadatke. U Webster-ovom rečniku robot je opisan kao „automatizovani uređaj koji obavlja funkcije koje se obično pripisuju čoveku“.
Zvanična definicija data od strane RIA (Robotic Industries Association) je, međutim, znatno preciznija, ali se odnosi samo na industrijske robote. Ona, u slobodnijem prevodu glasi:
„Industrijski robot je višefunkcionalni manipulator koji se može preprogramirati i koji je namenjen da pomera radni materijal, predmete, alat i specijalne uređaje na razne zadate načine u cilju izvršavanja različitih zadataka“.
Roboti koji imaju oblik ljudskog tela zovu se humanoidni roboti. Ako pored oblika ljudskog tela roboti poseduju i druge ljudske karakteristike kao što su kretanje, govor, gestikulacije itd, oni se nazivaju androidima (ovaj termin se ipak češće sreće u naučnoj fantastici). Inteligenciju koju robot poseduje čini u stvari elektronika upravljačke jedinice koja realizuje program ili sistem programa. Sposobnost robota da prepozna određene situacije i da se u njima snađe rešavajući ih potiče od senzorskih sistema.
Čovek još od davnina pokušava da oponaša prirodu posmatrajući kretanja čoveka i životinja. Industrijska revolucija i pronalazak struje omogućili su korišćenje složenijih mehaničkih delova što je ubrzalo razvoj robotike. Roboti su vremenom postajali manji i korisniji, pa su sada nezamenljivi u industriji i kritičnim situacijama.
Leonardov mehanički vitez je prvi dokumentovani humanoidni automat, koji je dizajnirao Leonardno da Vinči 1495. godine. Skice su pronađene u Leonardovoj svesci zajedno sa skicama mehaničkih ptica i insekata koje je autor dizajnirao pokušavajući da imitira prirodu. Nije potpuno jasno da li je Leonardo uspeo da završi svoj projekat robota-viteza, ali su skorije rekonstrukcije pokazale da je robot po nacrtu bio završen i funkcionalan.

Prema nacrtu, robot je bio odeven u nemačko-italijanski oklop iz kraja 15. veka. Bio je u stanju da vrši čovekolike pokrete, kao što su da ustane i sedne, podigne vizir, nezavisno pomera ruke, glavu i vilicu koja je bila anatomski ispravna. Za pokretanje robota koristio se složeni sistem kablova i koturova koji su imitirali tetive, zglobove i mišiće. Ovaj projekat je deo Leonardovog istraživanja o “zakonima proporcije“.
Patka koja vari je automat u obliku patke koji je dizajnirao Žak de Vokanson 1739. godine. Automat je mogao da jede i vari hranu, izbacuje otpat i maše krilima. Prilikom ovih procesa nije dolazilo do stvarnog varenja hrane, već bi se pojedena hrana smeštala u jednu posudu, dok bi se iz druge posude izbacivao otpad koji je bio unapred uskladišten. Autor se nadao da će nekad u budućnosti biti dizajniran automat koji će vršiti stvarno varenje hrane. Originalni primerak Patke koja vari uništen je u požaru koje je zadesio muzej 1879. godine.
Karakuri su tradicionalne japanske lutke proizvođene između 17. i 19. veka korišćene primarno u svrhu zabave. Najčešći su bili modeli korišćeni u pozorištima, domovima i religioznim festivalima.
Danas se uglavnom može naići na model koji služi čaj. Kada mu se u ruke stavi stavi šolja čaja, ovaj robot započinje kretanje unapred za predefinisanu dužinu, zatim se zaustavi i pokloni. To je znak da se šolja može skloniti. Kada mu se prazna šoljica vrati u ruke, robot se okrene i vrati odakle je došao. Za kretanje koristi točkove, dok pomeranjem stopala simulira ljudsko kretanje. Za pokretanje se koristi uvijena opruga od kitove kosti, a pokreti su kontrolisani sistemom poluga.

Pjer Žak-Droz je između 1768. i 1774. godine konstruisao tri mala automata, muzičarku, crtača i pisca, kao reklamu kako bi poboljšali prodaju svojih satova. Sva tri automata su i dalje funkcionalna i nalaze se u Muzeju umetnosti i istorije u švajcarskom gradu Nešatelu.
Muzičarka je lutka koja svira orgulje stvarnim pritiskanjem tastera (muzika nije unapred snimljena). Dok svira vidljivo je pomeranje njenih grudi kojim se simulira disanje, a pomerajima glave i očiju prati kretanje svojih prstiju.
Crtač je dečak koji može da nacrta četiri različita crteža: portret Luja XV, kraljevski par, psa sa naptpisom “Mon toutou” (“moja kuca”) i crtež Kupidona u kočijama koje vuče leptir. Ovaj automat koristi sistem koturova za pomeranje ruke u dve dimenzije i podizanje olovke. Takođe, crtač se pomalo pomera na stolici a s vremena na vreme dune u olovku kako bi je očistio od prašine.
Crtač je automat koji može da se programira da ispiše proizvoljan tekst dužine do 40 karaktera koristeći guščje pero i mastilo. Koristi sistem sličan sistemu koji koristi crtač i povremeno umoči pero u mastilo, a pokretom zgloba otrese višak mastila kako bi sprečio prosipanje. Pokretima glavom i očiju prati pero i tekst koji je ispisan.
Nikola Tesla je 1898. godine ispred Medison Skver Gardena prezentovao svoj novi izum koji je nazvao “automaton“. To je bio brod upravljan na daljinu, što je ujedno bio i prvi primer daljinskog upravljanja, a sami detalji su bili sakriveni zbog Tesline bojazni da bi mogli biti ukradeni kao što se to već dešavalo sa nekim njegovim prethodnim izumima. Za ovu svrhu je osmislio uređaj koji može da kodira i dekodira radio signale na brodu i donosi odluke na osnovu njih: logičku kapiju. Ovo otkriće kasnije doprinelo je i razvoju daljinski upravljanih vojnih oružja, robotskoj industriji, bežičnoj industriji i radio industriji.
Beogradska škola robotike odnosi se na grupu istraživača u oblasti robotike iz različitih institucija okupljenih u Beogradu. Njihovim radom Beograd je prepoznat kao kolevka moderne humanoidne robotike. Laboratorija za robotiku Instituta Mihajlo Pupin osnovana je 1967. godine. U Laboratoriji je radilo preko 30 istraživača koji su bili mahom mašinski i elektro inženjeri, kao i diplomirani matematičari sa Prirodnomatematičkog fakulteta. Radu laboratorije najviše je doprineo profesor Miomir Vukobratović.
Laboratorija za robotiku Instituta Mihajlo Pupin osnovana je 1967. godine u Beogradu. Prvobitno je osnovana kao Odeljenje za biokibernetiku u okviru Laboratorije za automatiku. U okviru ove laboratorije profesor Vukobratović je zajedno sa dr Juričićem nastavio proučavanje dinamike i kinematike velikih mehaničkih sistema uglavnom antropomorfnog tipa. Značajne rezultate u oblasti aktivnih mehanizama namenjenih kretanju tj. mehanizama sa pogonskim zglobovima donosi njihov zajednički teorijski rad. Rad pod nazivom Doprinos sintezi bipedalne lokomocije Vukobratović je prvi put predstavio u Moskvi 1968. godine u okviru IFAC 12 simpozijuma na temu Tehnički i biološki problemi kontrole, Jerevan. Rad je štampan naredne godine u zborniku (engl. Transactions on Biomedical Engineering). Ovo je ujedno bio i prvi štampani naučni rad u svetu u okviru oblasti modelovanja lokomocione dinamike. Pola veka kasnije ovaj pionirski rad postao je najproduktivniji i najatraktivniji predmet istraživanja u oblasti humanoidne robotike. Njihov rad je najavio formiranje i izdvajanje Robotike kao posebne naučne discipline i profesije.

Beogradska šaka koja se danas nalazi u Muzeju nauke i tehnike u Beogradu
Pre nego što je Laboratorija osnovana, proučavanje dvonožnog hoda je izbegavano zbog problema, uključujući problem balansa, odnosno stabilnosti bipedalnog hoda. Sa druge strane, u Laboratoriji se intenzivno radilo na matamatičkom modelovanju antropomorfnih aktivnih mehanizama, proučavanju stabilnosti i sintezi bipedalnog kretanja. Vukobratović je prvi u svetu uspešno objasnio i predstavio veštinu ljudskog dvonožnog kretanja na osnovu Njutnove mehanike i dinamike. Predstavio je jednostavan model dvonožnog kretanja sa sedam stepeni slobode i pet zglobova. Vukobratović je koncept u svojim radovima u periodu između 1970. i 1972. godine nazvao Teorija tačke nula momenta (engl. ZMP, Zero-Moment Point Theory) kojom je rešen problem načina na koji bipedalni roboti mogu da hodaju i održavaju ravnotežu.
Teorijski poduhvati istraživača Laboratorije i Beogradske škole robotike dali su rezultate i primenu u rehabilitacionoj robotici. U Laboratoriji su započeti pionirski radovi na razvoju stvaranju preteča ortoza poput prve protetičke šake, aktivnih egzoskeleta, industrijskog robota, potkolene proteze, itd. Godine 1968. započet je rad na konstruisanju jednostavnih egzoskeleta.
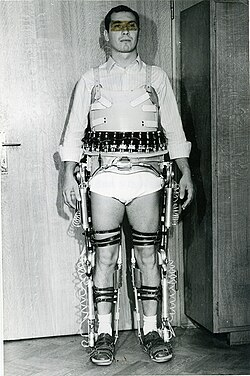
Aktivni egzoskelet 1972. godine
Koliki je bio značaj teorijskog, ali i praktičnog rada svedoči i podatak da je profesor Vukobratović od 1970. godine pozvan više od 145 puta od strane važnih edukativnih instituta i istraživača iz Kine, Rusije, SAD, Italije, Nemačke, Engleske, Poljske, sa ciljem da održi predavanja i prikaže aktuelne rezultate Laboratorije, kao i rad Beogradske škole robotike.