Šta je kinematski lanac?
Kinematski lanac predstavlja sistem međusobno povezanih krutih tela (članaka), koji su spojeni zglobovima ili drugim vrstama veza tako da omogućavaju relativno kretanje. Ovi lanci čine osnovu strukture robotskih manipulatora i drugih mehaničkih sistema.
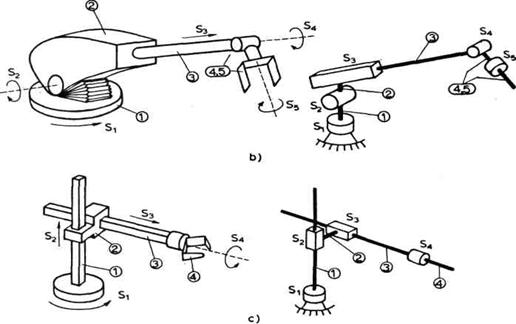
Svako telo, elemenat lanca, nazivaćemo segmentom lanca. Segmente lanca smatramo krutim, nedeformabilnim telima. Lanac se, dakle, sastoji od niza zglobova i segmenata. Zglobovi su obeleženi sa S (stepen slobode), a segmenti sa 1,2, …
U zavisnosti od toga kako su članovi povezani, kinematski lanci mogu biti:
Otvoreni kinematski lanci – imaju jedan fiksni kraj, dok se drugi slobodno kreće (npr. robotska ruka).
Zatvoreni kinematski lanci – formiraju zatvoreni sistem, gde su svi članovi međusobno povezani (npr. mehanizmi u motorima i zupčanicima).
Kinematski parovi
Kinematski parovi su spojevi između članova kinematskog lanca koji omogućavaju različite vrste relativnog kretanja. Oni se klasifikuju prema vrsti kontakta između članova:
1. Niži kinematski parovi (kontaktna površina je velika)
Obrtni (rotacioni) par – omogućava rotaciju oko jedne ose (npr. šarka na vratima).
Prizmatični (translacioni) par – omogućava linearno kretanje (npr. klizač na vodilicama).
Cilindrični par – omogućava kombinaciju rotacionog i translacionog kretanja (npr. teleskopska ruka robota).
Sferni (kuglični) par – omogućava kretanje u više pravaca (npr. kuglični zglob ramena).
2. Viši kinematski parovi (kontaktna površina je tačkasta ili linijska)
Zupčasti par – prenos kretanja preko zupčanika.
Kuglični ležajevi – smanjuju trenje pri rotaciji.
Klinasti i ekscentrični mehanizmi – omogućavaju specifične tipove pokreta.
Prosti kinematski parovi
Prosti kinematski parovi predstavljaju osnovne mehaničke veze između dva članka. U zavisnosti od stepena slobode koji dozvoljavaju, dele se na:
Obrtni par (R-veza)
Obezbeđuje jedan stepen slobode (rotaciju oko jedne ose).
Najčešći u robotici – koristi se u zglobnim robotima i robotskim manipulatorima.
Primer: Zglob ruke robota, rotacija između dva segmenta manipulatora.
Translacioni par (P-veza)
Dozvoljava jedan stepen slobode (pravolinijsko kretanje u jednoj osi).
Prisutan u robotskim sistemima sa kliznim mehanizmima (kartezijanski roboti).
Primer: Linearni aktuator u CNC mašinama ili robotskim manipulatorima.
Sferni par (S-veza)
Dozvoljava tri stepena slobode (rotacije oko tri ortogonalne ose).
Redak u industrijskoj robotici, ali se koristi u humanoidnim robotima i složenim manipulatorima.
Primer: Kuglični zglob u ramenu robota.
Višeredni kinematski parovi
Višeredni kinematski parovi su složenije veze koje dozvoljavaju kombinovano kretanje i često smanjuju potrebu za dodatnim mehanizmima.
Cilindrični par
Kombinacija obrtne i translacione veze.
Dva stepena slobode (rotacija + translacija).
Primer: Klipni aktuator sa mogućnošću rotacije.
Prizmatični par
Ograničava rotaciju i dozvoljava samo translaciju u dve ose.
Primer: Klizni nosači u robotskim sistemima.
Vijčani par
Kombinuje rotaciju i translaciju duž ose (kao zavrtanj).
Jedan stepen slobode, ali kretanje nije nezavisno (rotacija izaziva translaciju).
Primer: Precizni pomični mehanizmi u industrijskim robotima.
Praktična primena
U industrijskoj robotici, kinematski parovi se koriste za ostvarivanje preciznih i ponovljivih pokreta manipulatora. Na primer, robotska ruka koristi niz obrtnih parova kako bi postigla željene položaje i obavila zadatke poput zavarivanja, sklapanja ili pakovanja.