
Kinematički parovi
Kinematički par podrazumeva dva međusobno povezana tela. U zavisnosti od načina vezivanja ta dva dela, kinematičke parove delimo na određene klase. Da bismo te klase mogli definisati razmotrićemo moguće načine veze dva tela.
Posmatraćemo prvo jedno slobodno telo. Ono može da se kreće na šest nezavisnih različitih načina: može da se kreće translatorno duž osa x, y, z i može da se obrće oko svake od tih osa (vidi sliku), dakle ima tri moguće, odnosno slobodne translacije i tri slobodne rotacije. Iz toga zaključujemo da je potrebno šest veličina (koristićemo izraz parametri) da bi se jednoznačno odredio položaj tela: tri parametra da bi se odredilo translatorno kretanje i tri da bi se odredilo rotaciono kretanje, odnosno orijentacija tela.
Broj stepeni slobode je broj slobodnih (odnosno mogućih) nezavisnih kretanja, ili drugačije rečeno, to je broj nezavisnih parametara koji su potrebni da bi se jednoznačno odredio položaj tela. Posmatrajmo sada dva tela, valjak i klešta, međusobno vezana na način kako je to pokazano na slici. Valjak, u odnosu na klešta ima dve slobodne transla-cije (duž x i y ose) i dve slobodne rotacije (oko x i z ose), dakle postoje ukupno 4 slobodna međusobna kretanja ova dva tela. Zato kažemo da ovaj kinematicki par ima 4 stepena slobode.
U tabeli su dati su neki slučajevi kinematickih parova, njihova moguća kretanja, broj stepeni slobode i klasa kinematičkog para.
Za primenu u robotici najvažniji su kinematički parovi pete klase. Kinematicki par pete klase koji dozvoljava samo jednu rotaciju zvaćemo rotacionim parom ili rotacionim zglobom, a par koji dozvoljava samo jednu translaciju zvaćemo translatornim parom ili translatornim zglobom.
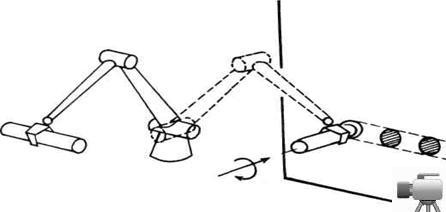
Za robotske mehanizme karakteristično je da tokom rada robota kinematički lanac menja svoju strukturu od otvorene ka zatvorenoj i obrnuto. Na narednoj slici prikazan je manipulacioni robot koji u fazi prenošenja predmeta (faza a) predstavlja otvoreni lanac, a u fazi uvlačenja predmeta u otvor (faza b) predstavlja zatvoreni lanac. U fazi b lanac je zatvoren jer ruka sa radnim predmetom, podloga robota i zid obrazuju zatvoreni niz. Primer prikazan na ovoj slici deo je zadatka montaže.
Zaključak
Kinematski parovi su ključni za projektovanje robotskih sistema jer određuju kretanje i stepen slobode manipulatora. Od jednostavnih obrtnih i translacionih spojeva do složenih cilindričnih i vijčanih veza, pravilan izbor kinematskog para značajno utiče na efikasnost i funkcionalnost robota.



