Radni prostor robota definiše sve moguće tačke koje kraj manipulatora (end-effector) može dosegnuti. On zavisi od vrste zglobova, njihovih ograničenja i dužina segmenata robota.
Postoje dva osnovna tipa zglobova u robotici:
Prizmatični zglob (T - Translacioni) – omogućava linearno kretanje u jednoj osi.
Rotacioni zglob (R - Rotacioni) – omogućava kružno kretanje oko fiksne ose.
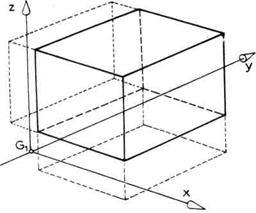
Ova konfiguracija se često koristi kod kartezijanskih robota.
Radni prostor je pravougaoni ili kubni, ograničen hodom svake ose.
Prednost: jednostavno programiranje i visoka preciznost.
Nedostatak: ograničena fleksibilnost u nekim aplikacijama.
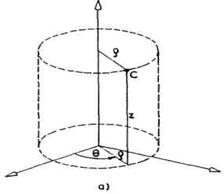
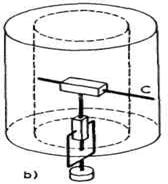
Ovaj sistem se često koristi kod SCARA robota.
Radni prostor je u obliku izrezanog cilindra.
Prva dva zgloba omogućavaju rotacije u ravni, dok treći pruža vertikalno kretanje.
Prednost: brza i precizna manipulacija u ravni.
Nedostatak: ograničen vertikalni domet.
Najčešće se koristi kod antropomorfnih (zglobnih) robota.
Radni prostor ima oblik složenog sfernog volumena.
Omogućava visoku fleksibilnost i slobodu pokreta.
Prednost: širok spektar primena (montaža, zavarivanje, slikanje, medicinska robotika).
Nedostatak: složeno programiranje i kinematički proračuni.
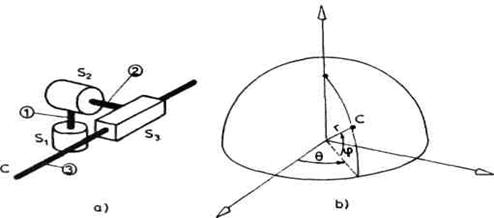
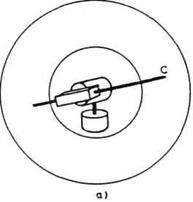
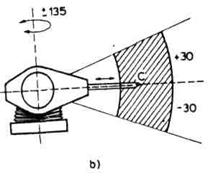
Ako uvedemo graničnike za maksimalno i minimalno izduženje u zglobu S3, a smatramo da su obrtanja u zglobovima S1 i S2 bez ograničenja, tada je radni prostor robota jedna šuplja lopta. Ako postoje graničnici koji određuju krajnje tačke obrtanja u zglobovima S1 i S2, tada je radni prostor jedan isečak opisane lopte.
Dužina segmenata robota – veće dužine daju veći domet.
Ograničenja zglobova – fizička ograničenja mogu suziti radni prostor.
Sudari sa okolinom – prepreke mogu smanjiti efektivan radni prostor.
Razumevanje radnog prostora robota ključno je za pravilan izbor manipulatora u industrijskim i naučnim aplikacijama. Svaka konfiguracija ima svoje prednosti i ograničenja, a izbor zavisi od zadatka koji robot treba da obavlja.
Senzori igraju ključnu ulogu u omogućavanju robotima da percipiraju svoje okruženje i prilagode svoje operacije unutar radnog prostora. Oni pomažu u određivanju položaja, izbegavanju prepreka, preciznom hvatanju objekata i interakciji sa okolinom.
Senzori u robotici mogu se podeliti na unutrašnje i spoljašnje senzore:
Unutrašnji senzori – mere stanje robota, kao što su položaj zglobova, brzina i ubrzanje.
Spoljašnji senzori – detektuju informacije iz okruženja, uključujući objekte, prepreke i sile interakcije.
Merenje ugla rotacije ili translacije zgloba.
Inkrementalni – mere promene položaja.
Apsolutni – daju tačan položaj u svakom trenutku.
Primena: precizno određivanje položaja manipulatora u prostoru.
Akcelerometri mere ubrzanje robota u 3D prostoru.
Žiroskopi mere ugaonu brzinu zglobova ili celog robota.
Primena: stabilizacija pokreta, balansiranje humanoidnih robota.
Lidar (Light Detection and Ranging) – koristi laserske zrake za mapiranje prostora.
Ultrazvučni senzori – koriste zvučne talase za detekciju prepreka.
Primena: autonomna navigacija, izbegavanje prepreka, određivanje radnog prostora u dinamičnom okruženju.
Kamere sa dubinskim senzorima (npr. Intel RealSense, Microsoft Kinect).
Omogućavaju prepoznavanje objekata i procenu njihovog položaja.
Primena: precizno hvatanje, inspekcija i montaža u industriji.
Mere kontaktne sile između robota i objekta.
Haptički senzori daju robotički osećaj dodira.
Primena: precizno rukovanje predmetima, sprečavanje oštećenja krhkih objekata.
Senzori položaja (enkoderi, IMU) osiguravaju da robot zna gde se nalazi u radnom prostoru.
Senzori prepreka (lidari, ultrazvuk) omogućavaju da robot izbegava sudare.
Vizuelni senzori (kamere, 3D skeneri) omogućavaju robotsku ruku da pronađe i uhvati objekte.
Taktilni senzori i senzori sile omogućavaju prilagođavanje sile hvatanja i interakciju sa okruženjem.
Senzori su ključni za funkcionalnost robota unutar radnog prostora, omogućavajući mu da precizno kontroliše svoje pokrete, izbegava prepreke i interaguje s objektima. Razvoj naprednih senzorskih sistema omogućava sve složenije operacije u industriji, medicini i autonomnim sistemima.