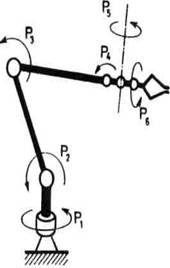
Pogonski sistemi su ključni element industrijskih robota jer omogućavaju precizno kretanje i obavljanje zadataka. Postoji više vrsta pogona, a njihov izbor zavisi od primene robota i njegovih tehničkih zahteva. Na slici je dat šematski prikaz robota i pokreti zglobova koje pogon ostvaruje
Preteče robota su bili prvi prosti industrijski manipulatori. Oni su opsluživali mašine i imali su pneumatski pogon. Zglobove manipulatora su pokretali cilindri pogonjeni komprimovanim vazduhom.
Takvi pogoni su bili brzi i veoma pouzdani. Medjutim, pneumatski pogon se veoma retko sreće kod savremenih industrijskih robota jer se takav pogon teško reguliše. Naime, nekada nije bilo bitno da se ostvari tačno zadata pozicija. Manipulator je premeštao predmet iz jedne tačke u drugu, a pozicija zgloba je ograničavana graničnicima. Takav način pokretanja nije mogao zadovoljiti savremene zahteve robotike pa je pneumatski pogon skoro izbačen iz upotrebe kod robota.
Ipak, treba reći da se u poslednje vreme uspešno razvio pneumatski servo pogon koji može da zadovolji zahteve savremenih robota.
- Koriste komprimovani vazduh za prenos energije.
- Pogodni za lakše i brže zadatke.
- Jednostavni za održavanje.
- Niska cena i jednostavna konstrukcija.
- Brza reakcija i kretanje.
- Manja snaga u odnosu na hidrauliku.
- Manja preciznost kontrole kretanja.
Roboti za montažu u industriji elektronike.
Pakovanje i manipulacija lakim predmetima.
Jedan od prvih, a još uvek jednako aktuelnih pogonskih sistema u robotici je hidraulični pogon. U cilindru se nalazi ulje pod pritiskom. Pritisak, posredstvom klipa, pokreće zglob robota. Regulacija kretanja ostvaruje se regulacijom pritiska u cilindru i protoka ulja kroz cilindar. Napajanje cilindra uljem i regulacija protoka vrši se pomoću uređaja koji se naziva servorazvodnik. Kako se u sklopu servorazvodnika nalazi i elektromotor koji pokreće klip razvodnika, to obično govorimo o elektrohidrauličnom pogonu.
Prednosti hidrauličnog pogona su znatne. Pre svega, moguće je ostvariti visoke pritiske u cilindrima, pa time i veoma velike sile u zglobovima robota. Dovoljno je setiti se bagera-kašikara čija "ruka" se pokreće hidrauličnim pogonom. Zahvaljujući toj mogućnosti postizanja velikih sila roboti sa hidrauličnim pogonima nemaju reduktore što znatno pojednostavljuje konstrukciju. Treba još reći da je hidraulični pogon pojednako pogodan i za translatorna i za rotaciona pomeranja.
Najveće prednosti hidraulični pogon iskazuje u primeni kod teških robota. Ovi roboti, namenjeni manipulisanju sa većim teretima (od 100 kg pa i više), moraju ostvariti velike pogonske sile i momente u svojim zglobovima. Hidraulični pogon, za razliku od drugih, vrlo lako ostvaruje takve sile. Pored toga, robot nema reduktor, a nije potrebna ni kompenzacija statičkog opterećenja.
- Koriste hidrauličnu tečnost za prenos energije.
- Velika snaga i sposobnost podizanja teških tereta.
- Glavni izbor za robote koji zahtevaju velike sile (npr. građevinski roboti).
- Velika nosivost.
- Precizna kontrola čak i kod većih opterećenja.
- Složena konstrukcija.
- Potrebno redovno održavanje sistema tečnosti zbog curenja ulja.
Roboti za zavarivanje u teškoj industriji.
Roboti za manipulaciju teškim materijalima u logistici.
Uz sav opisani značaj koji poseduje hidraulični pogon, u poslednje vreme se uočava tendencija prelaska na električni pogon robota. Ranije je električni pogon korišćen za lake i srednje robote, a danas se i teški roboti sve više projektuju kao električni. Njihova široka upotreba posledica je najpre činjenice da je njihova regulacija relativno jednostavna, a zatim i nekih nedostataka hidrauličnih pogonskih sistema. Hidraulični pogon ima ograničenu maksimalnu brzinu klipa u cilindru, pa je otuda ograničena i brzina robota, a takođe uvek prisutan problem curenja ulja.
Uz konstataciju da se sve više koristi električni pogon robota treba ukazati i na niz problema koje takav pogon donosi. Današnji motori za jednosmernu struju još uvek imaju prilično velike brzine obrtanja (na primer 3000-4000 obrtaja u minuti), a ostvaruju relativno male pogonske momente (na primer do 20 Nm). Zato su neophodni reduktori koji će smanjiti brzinu i povećati momenat. Pre-nosni odnosi reduktora moraju nekada biti prilično veliki (i do 300 puta). Pošto je trenje u reduktoru uvek prisutno, gubi se dobar deo snage (kod dobrih reduktora do 15%), pa je to jedna od nepogodnosti ovakvog pogona. Sledeći problem je mesto postavljanja elektromotora. Da bi se postigla bolja statička uravnoteženost robota motori se često postavljaju tako da su udaljeni od zglobova koje pokreću. Zato je potrebno projektovati mehanizam kojim će se pogon preneti od motora do zgloba. Takav mehanizam ne samo da usložnjava konstrukciju robota već donosi i neke druge probleme kao što je, na primer, problem elastičnih deformacija i oscilacija u prenosnom mehanizmu.
Poseban nedostatak elektromotora jednosmerne struje je postojanje komutatora sa četkicama. Kod takve komutacije javlja se varničenje, smanjuje se dozvoljena brzina obrtanja, a dopunska nepogodnost nastaje zbog trošenja četkica. Ovi problemi, međutim, rešavaju se razvojem motora bez četkica (engl. brushless motors) tj. motora sa elektronskom komutacijom.
Kod manjih robota sreću se često i koračni elektro motori (engl. stepping motors), veoma pogodni za povezivanje sa računarom. Međutim, budući da rade u otvorenoj sprezi, još uvek nije razrešeno pitanje njihove potpune pouzdanosti u smislu preciznog pozicioniranja pogotovo u radu sa većim teretima.
Ukažimo sada i na neke nove mogućnosti električnog pogona. Neke su već u potrebi, a neke su stvar blize ili dalje budućnosti. Kako je jedan od glavnih nedostataka elektromotora njihov mali pogonski momenat, a ovaj zavisi od magnetnog polja u motoru, to je usavršavanje usmereno ka razvoju snažnih stalnih magneta čije bi snažno polje omogućilo veći pogonski momenat. Tako se već uveliko proizvode motori sa samarijumom-kobalt magnetima koji su omogućili znatno povećanje pogonskog momenta pri istim dimenzijama motora. To je ipak samo kvantitativni napredak. Nešto kvalitativno novo predstavljaju takozvani motori za direktni pogon. Često se koristi engleski termin direkt drajv (direct drive). Ovi motori, zahvaljujući izuzetno snažnim magnetima i specifičnoj konstrukciji, ostvaruju izuzetno velike pogonske momente, pa više nema potrebe za reduktorom. Takvi motori postavljaju se direktno u zglobove i nema posebnog prenosnog mehanizma. Direkt drajv motori su još u eksperimentalnoj fazi ali se od njih u robotici dosta očekuje.
Još jedna novost u pogonu robota je upotreba motora za naizmeničnu struju. U robotici se pojavljuju tek od skora prvenstveno zbog toga što je regulacija ovih motora, a to znači i upravljanje robotom složenije.
Automobilska industrija (sklapanje delova).
Medicinski roboti za hirurgiju.
Kolaborativni roboti (coboti) u proizvodnji.
- Koriste kombinaciju različitih pogona za specifične zadatke.
- Pogodni za lakše i brže zadatke.
- Na primer, hidraulika za osnovne pokrete i električni motori za preciznu kontrolu.
- Niska cena i jednostavna konstrukcija.
- Brza reakcija i kretanje.
- Manja snaga u odnosu na hidrauliku.
- Manja preciznost kontrole kretanja.
Roboti za spašavanje u nepovoljnim uslovima.
Multifunkcionalni roboti u montaži velikih konstrukcija.