Sila stezanja je sila kojom gripper (hvataljka) pridržava predmet tokom manipulacije. Ne radi se samo o dršci, već o preciznoj kontroli snage: dovoljno jaka da objekt ne isklizne, a istovremeno nežna da ga ne ošteti.
Zaštita krhkih objekata: Prevelika sila može dovesti do lomova ili deformacija, što je kritično npr. u elektronici ili prehrambenoj industriji.
Pouzdano i sigurno držanje: Senzori pomažu u sprečavanju iskliznuća čak i kod objekata s niskom površinskom adhezijom.
Bezbednost u kolaborativnim operacijama: Hvataljke s integrovanim senzorima mogu preduprijediti neželjene sile kod interakcije sa ljudima.
Koriste se umetnute metalne trake koje menjaju otpor pod pritiskom — merena sila se računa preko promene struje. Pouzdano, ali zahteva kalibraciju i robustnu konstrukciju.
Prilagođeni za detekciju normalnih i tangencijalnih sila (shear), pružaju višedimenzionalni uvid u kontakt.
Kombinuju proximity, force/torque senzore i algoritme za kontrolu hvata — koriste se u preciznim pick-and-place zadacima.
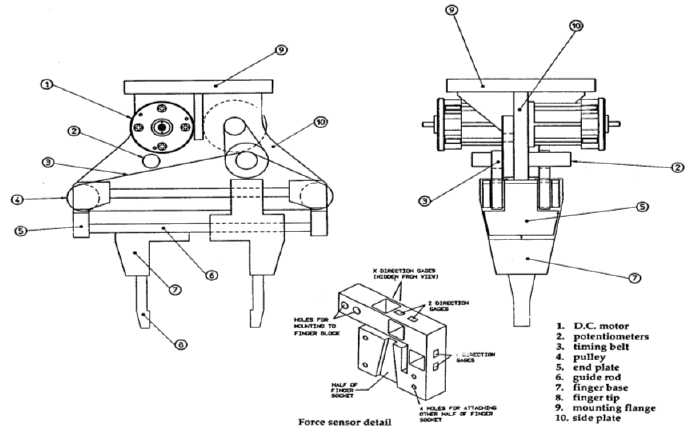
Gripper ima ugrađene senzore (strain gauge ili taktilne) u prstima.
Podaci iz senzora se šalju u mikrokontroler koji procesuje signal i odlučuje o potrebnoj sili.
Kontrolni sistem (PLC/robotička kontrola) koristi te podatke za closed-loop upravljanje (zatvorena petlja).
Ako se detektuje klizanje, gripper automatski prilagođava silu hvata — sprečava pad objekta.
Ilustracija na početku prikazuje servo-gripper s integrisanim taktilnim senzorima na prstima i signalnim vodovima ka kontroleru.
Pristup |
Opis |
|---|---|
Otvorenog kruga |
Gripper pokreće fiksnu silu prema unapred definisanoj jačini struje |
Zatvorene petlje (feedback) |
Senzorski signal reguliše silu u realnom vremenu (npr. RG2-FT) |
Hybrid kontrola |
Kombinovani pristup sile i položaja (impedance control) prema kontaktu |
Hybrid kontrola omogućava robotu da deluje kao elastični sistem: pri kontaktu sa objektom, reaguje proporcionalno sili i brzini.
Potrebno: model hvataljke (npr. Robotiq), merač sile (eksterni senzorski blok ili set tegova), veza sa računarom.
Pripremimo tablicu: sila (N) vs ADC očitavanje ili vrednost iz softvera.
- Kalibrisanje hvataljke (zero, referenca).
- Postepeno povećavamo silu (npr. drži 1 kg teg).
- Zabeležimo očitanu silu (npr. 9.8 N).
- Ponavljamo za 2 N, 5 N, 10 N itd.
- Napravimo graf i analiziramo linearnu zavisnost, preciznost, uticaj greške.