
1. Uvod
Definicija:
Mehanički
hvatači (grippers) su end-effector uređaji koji koriste mehaničke
komponente (prste, kliješta, zavrtanjske
ili zupčaste mehanizme) da uhvate, drže i manipulišu objektima.
Uloga:
Koriste
se za precizno hvatanje različitih vrsta objekata, često sa
zadatim, fiksnim geometrijskim karakteristikama.
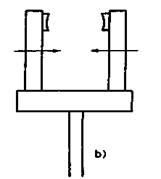
Hvataljke mogu biti obične ili duple (sl.1). Dupla hvataljka je uređaj koji se sastoji od dve hvataljke montirane na vrhu robota. Ovakve hvataljke sreću se uglavnom kod zadataka u kojima robot stavlja i vadi radne predmete iz neke mašine (na primer prese). Tada robot jednom hvataljkom prinosi predmet, zatim drugom hvataljkom vadi prethodni predmet iz mašine pre nego što unutra stavi novi; konačno prethodni predmet se odlaže na to predviđeno mesto. Tako se brzo može izvršiti zamena radnog predmeta u mašini.
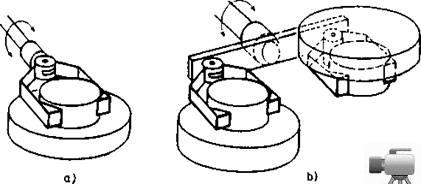
Slika 1. Obična (a) i dupla hvataljka (b)
2. Tipovi mehaničkih hvatača
Hvataljke sa prstima:
Dva ili više prstiju koji se otvaraju i zatvaraju paralelno. Obično se pokreću pneumatskim, električnim ili hidrauličkim aktuatorima, mada se ovde fokusiramo na mehaničku konstrukciju.
- Prema broju prstiju mogu biti: hvataljke sa dva prsta i hvataljke sa više prstiju. U industrijskim primenama pretežno srećemo hvataljke sa dva prsta.
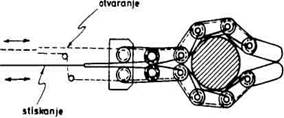
- Prema načinu hvatanja mogu biti hvatači sa spoljašnjim i unutrašnjim hvatom (sl. 2).
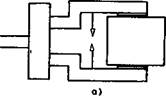
Slika 2. Spoljašnje (a) i unutrašnje (b) hvatanje
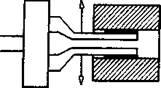
- Prema načinu kretanja prstiju razlikujemo hvatače sa paralelnim i obrtnim kretanjem prstiju (sl. 3)
Slika 3. Hvatači sa obrtnim (a) i translatornim (b) kretanjem prstiju
Razlike medu hvataljkama postoje i po načinu održavanja krutog kontakta hvataljke sa predmetom. Jedan način sastoji se u tome da se postave takva geometrijska ograničenja koja će onemogućiti relativno kretanje predmeta u odnosu na hvataljku (sl. 4a). U drugom pristupu, geometrija hvatanja je takva da dopušta pomeranje predmeta u odnosu na hvataljku (dakle i ispadanje) ali do pomeranja ne dolazi zbog delovanja sile trenja (sl. 4b).
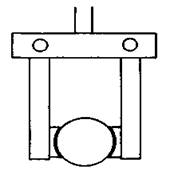
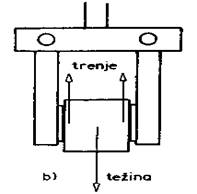
Slika 4. Dva načina držanja predmeta
Adaptivni (fleksibilni) mehanički hvatači:
Pod pojmom univerzalnih i prilagodljivih hvataljki podrazumevaju se hvataljke koje mogu da hvataju predmete različitog oblika i veličine. U pitanju su razna konstruktivna rešenja koja omogućavaju hvataljki da prilagođava svoj oblik predmetu. Osim toga adaptivnim hvataljkama smatraju se i hvataljke sa više prstiju koje, po ugledu na šaku čoveka, mogu hvatati predmete različite po obliku i veličini.
Navešćemo dva primera prilagodljivih hvataljki. Na slici 5. prikazana je hvataljka čija su dva prsta napravljena u vidu mekanih plastičnih vrećica ispunjenih sitnim kuglicama od tvrdog materijala. U svom osnovnom stanju ovakvi prsti su veoma rastresiti. Otuda, kada hvataljka počinje da hvata neki predmet, prsti se postepeno oblikuju prema površini predmeta koji hvataju. Dakle, prsti prilagodavaju svoj oblik. Kada je hvatanje završeno tada vakuumska pumpa izvlači vazduh iz prstiju. Vrećica steže kuglice koje sada vrše jak pritisak jedna na drugu. Takvi prsti više nisu rastresiti nego veoma kruti, ali oblikovani prema predmetu.
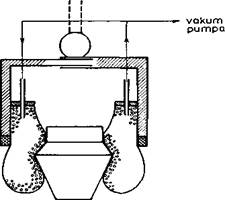
Slika 5. Hvataljka sa prilagodljivim oblikom prstiju
Drugi način da se postigne prilagodljiv oblik prstiju je korišćenje člankovitih univerzalnih prstiju (sl. 6). Potezanjem užeta prsti se skupljaju i pri tome obuhvataju predmet prilagodavajući mu se.
Slika 6. Člankoviti univerzalni prsti
Hvataljke sa više prstiju najčešće imitiraju čovekovu šaku, pa imaju, u principu, pet prstiju. Nekada imaju tri prsta jer čovek niz radnji obavlja upravo sa tri prsta.
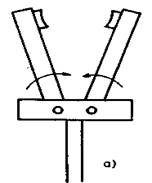
Pokretanje prstiju predstavlja poseban problem. Slika 7. prikazuje jednu mogućnost za pokretanje jednog od zglobova prsta. Pokretanje se ostvaruje povlačenjem trake (užeta). Očigledno, na ovaj način svaki zglob zahteva poseban pogon i postavlja se veoma složen problem ostvarivanja koordinisanog i funkcionalnog kretanja prstiju.
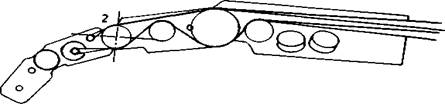
Slika 7. Pokretanje zglobova prsta
3. Prednosti i nedostaci mehaničkih hvatača
Prednosti:
Jednostavnost konstrukcije i robustnost.
Relativno niska cena i jednostavno održavanje.
Visoka preciznost kod standardizovanih aplikacija (kada se radi o objektima sa poznatim dimenzijama).
Nedostaci:
Ograničena prilagodljivost kod objekata sa različitim oblicima ili veličinama.
Ponekad zahtevaju složen mehanizam za pravilno podešavanje sile hvata.
4. Primena mehaničkih hvatača u industriji
Primeri:
Automobilska industrija (sklapanje delova).
Elektronska montaža (precizno postavljanje komponenti).
Preuzimanje standardnih ambalaža u logistici.