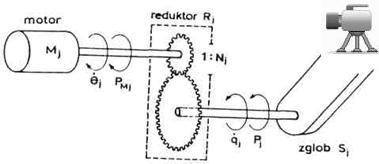
Problem prenosa pogonskog momenta od motora do zgloba je važno i dosta opširno pitanje. Naime, postoji veliki broj različitih rešenja prenosnog mehanizma i nemoguće ih je sve predstaviti. Zato ćemo se ovde zadržati na nekoliko primera koji su relativno često korišćeni. Tako čitalac dobija određenu predstavu o ovom problemu. Kao prvo uočavamo sledeće: motori jednosmerne struje daju male momente i velike brzine obrtanja. Ove pojmove malo i veliko treba shvatiti uslovno. Mislimo da su momenti mali u odnosu na momente koji su potrebni za pokretanje robota, a brzine su velike u odnosu na brzine kojima se obrću zglobovi robota pri nekom uobičajenom kretanju. Zbog ovoga prenosni mehanizam uvek sadrži reduktor koji u određenom odnosu povećava pogonski momenat (na primer i puta) i u istom odnosu smenjuje brzinu obrtanja (takođe i puta). Ovaj odnos naziva se prenosni odnos reduktora, ili stepen redukcije. Najjednostavnija realizacija reduktora je u obliku para zupčanika (slika) čiji su poluprečnici u odnosu i = z1/z2.
Iz mašinskih elemenata je poznato da je obrtni moment na izlazu prenosnika (u zglobu S1) veći nego na samom pogonskom motoru, a na isti način je i broj obrtaja (ugaona brzina) manji u odnosu na pogon. Koeficient kojim se množi obrtni moment ili deli ugaona brzina je prenosni odnos reduktora (i)
i = P2/P1 = w1/w2
U praksi, da bi se ostvario željeni prenosni odnos reduktora neophodno je redovno vezati nekoliko parova zupčanika i tako u nekoliko koraka ostvariti željenu redukciju. Naime, jasno je da se ne može praviti par zupčanika čiji bi poluprečnici bili u odnosu, na primer, 1:300. U slučaju više parova javlja se problem zazora. U svakom kontaktu dva tela, pa tako i zupčanika, javlja se prazan hod ili zazor, dakle malo pomeranje koje ne možemo kontrolisati. Otuda je poželjno izbegavati veći broj parova zupčanika da se zazor ne bi umnožavao. Jedan način da se ovaj problem reši je konstrukcija specijalnih vrsta reduktora koji uspevaju da ostvare velike prenosne odnose sa jednim ili bar sa malim brojem zupčastih parova. Od takvih konstrukcija u robotici se najčešće koriste tzv. harmonijski (harmonic drive) reduktori.
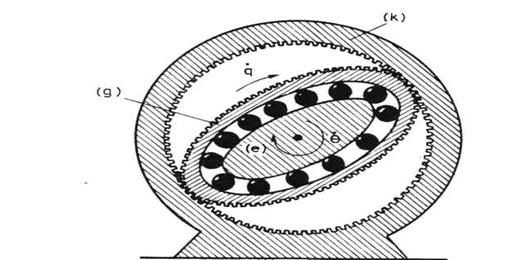
Treba još reći da se harmonik drajv reduktori odlikuju jako malim zazorom ali se s druge strane mora voditi računa o uvijanju reduktora pri prenosu većih opterećenja. Takodje, potrebno je uzeti u obzir i gubitke snage zbog trenja koje je uvek prisutno kod reduktora. Zbog toga, snaga na izlazu je uvek manja od snage na pogonu.
Što se tiče ostalih prenosnika (kaišni i lančani), njihova upotreba kod robota je znatno redja zbog pojave zazora. Zazor je najveći neprijatelj preciznosti prenosnika. Do zazora dolazi usled istezanja lanca ili priklizavanja kaiša, i ta činjenica uzrokuje probleme pri upravljanju robotima (kao što ćemo videti na narednim predavanjima).
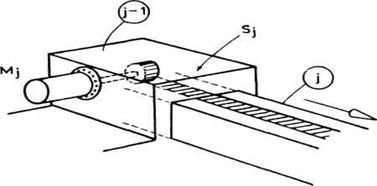
Na narednim slikama su prikazane dve mogućnosti prenosa koji omogućava pokret zgloba lakta, i prenosnik translatornog zgloba:
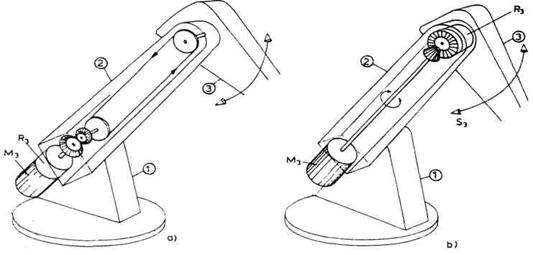
Prvi primer je spoj konusnih zupčanika sa lančanim prenosom do zgloba. Pozitivna strana tog rešenja je što je reduktor udaljen od zgloba pa je dinamičko opterećenje manje, ali upravljivost narušena zbog zazora u lančanom prenosu (istezanje lanca). U drugom primeru je reduktor postavljen u samom zglobu i konzolno povezan sa pogonom (manji zazor) ali zbog položaja reduktora, javljaju se veća dinamička opterećenja.
Treći primer je najčešći slučaj translatornog pomeranja zgloba zupčastom letvom. Druga mogućnost je korišćenje zavojnog vretena.