ATC omogućava robotu da automatski menja alat (hvataljku, senzor, proces alat) bez ručne intervencije, što znatno smanjuje vreme zastoja i povećava fleksibilnost proizvodnog procesa.
Omogućava jednoj robotskoj ruci da obavlja različite zadatke: hvatanje, zavarivanje, inspekciju, poliranje itd.
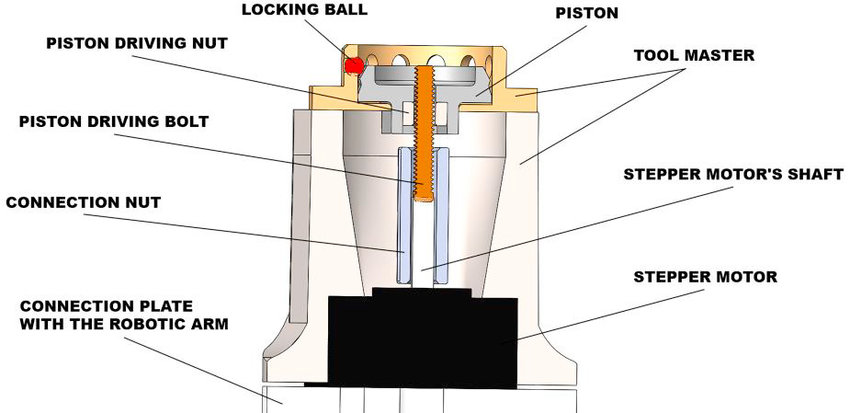
Na slici iznad se vidi mehanizam automatskog alata za izmene (tool changer):
Master ploča montirana na zglob robota (robot-side).
Tool ploča pričvršćena na alat (gripper, senzor, suvač).
Zaključavanje (clamping) obavlja pneumatika ili mehanički zatezač: osigurava robusnu i preciznu vezu koja može da izdrži sile i momentne opterećenja.
Integrisani pristupni konektori omogućavaju protok struje, pneumatike, signala i fluida između robota i alata.
Robot dolazi u poziciju za izmene alata koju definišemo u programu.
Trenutni alat se otključava i otpusti, potom robot pomera ruku do sledeće alatne postaje (magacin).
Novi alat se pobira: ploče se listaju, zaključavanje se aktivira, uspostavlja se e‑signal, pneu/električni priključci se povezuju.
Robot nastavlja rad sa novim alatom.
Prednost |
Objašnjenje |
|---|---|
Veća fleksibilnost |
Robot istovremeno može raditi više zadataka (npr. zavarivanje i paletizacija) |
Skraćeno vreme ciklusa |
Automatska promena alata traje nekoliko sekundi, ne sati ati-ia.com |
Minimizacija grešaka |
Smanjuje manuelnu intervenciju i greške u montaži alata |
Prilagodljivost ćeliji |
Lakše konfigurisanje različitih zadataka i SKU-a u industrijskoj liniji |
Objasniti pojmove: master plate, tool plate, tool magazine, locking mechanism, konektori (električni, pneumatic).
Simulacija u RoboDK: kreiramo dva alata – npr. gripper i senzor.
Logika programa:
Move to tool-change position;Disconnect current tool;Index to next tool;Engage locking mechanism;Activate power/signals;Resume task.
Kada je ATC opravdano koristiti, a kada je dovoljno ručno pričvršćivanje?
Ograničenja: dodatna masa, prostor, složenost – može smanjiti nosivost ili dinamičke performanse.
Automatski alat za izmene je sofisticirana mehanička i elektronska veza između robota i završnog alata. Omogućava robotu da brzo i pouzdano menja zadatke, podržavajući višefunkcionalnost, veću produktivnost i veći ROI u industrijskim aplikacijama.