Sila stezanja je sila kojom hvataljka (gripper) pridržava predmet tokom manipulacije. U kontekstu samog end-effector-a, ovde govorimo o:
mehaničkoj konstrukciji i sposobnosti da prenese potrebnu silu,
izboru optimalne sile u okviru mehaničkih i aplikacionih zahteva,
sigurnosnim ograničenjima i ergonomiji hvatanja.
Da bi predmet ne iskliznuo tokom kretanja, sila stezanja F mora da zadovolji:
Gde su:
m – masa predmeta (kg)
a – ubrzanje (m/s²)
g – gravitacija (~9.81 m/s²)
μ – koeficijent trenja između gripper‑a i predmeta
n – broj kontakata (prsti)
S – faktor bezbednosti
(>1)
Ovaj izraz je standardan u industriji za planiranje
hvata ([turn0search21]).
Oblik kontaktnog prsta utiče na površinu kontakta i trenje. Širi prsti sa mekšim površinama povećavaju efektivni kontakt ([turn0search0]).
Gumene ili silikonske površine imaju veći μ, što smanjuje zahtevanu silu hvata.
Više kontakta znači da svaki pritisak može biti niži dok ukupna sila ostaje dovoljna (n raste → F može biti manja).
Pneumatski gripperi lako postižu visoke sile, ali im je preciznost manja.
Servo‑gripovi pružaju veću kontrolu sile zahvaljujući senzorskoj povratnoj petlji.
Tip hvataljke |
Upotreba |
Sila stezanja / prednosti |
|---|---|---|
Mekanički gripper |
Pick-and-place |
Srednja preciznost, trajnost, jednostavna kontrola |
Pneumatski gripper |
Eksploatacija snage |
Visoka sila, brzo reagovanje, ali bez povratne kontrole |
Vakumski gripper |
Ravne površine (karton) |
Ne zahteva trenje, ali zavisi od gustoće vazduha i površine |
Magnetni gripper |
Feromagnetni detalji |
Precizan, ali samo za metal, stabilan pritisak ([turn0search15]) |
Soft gripperi |
Nepravilni i osetljivi objekti |
Prilagodljivi oblik, nežan pristup, za hranu i plastiku |
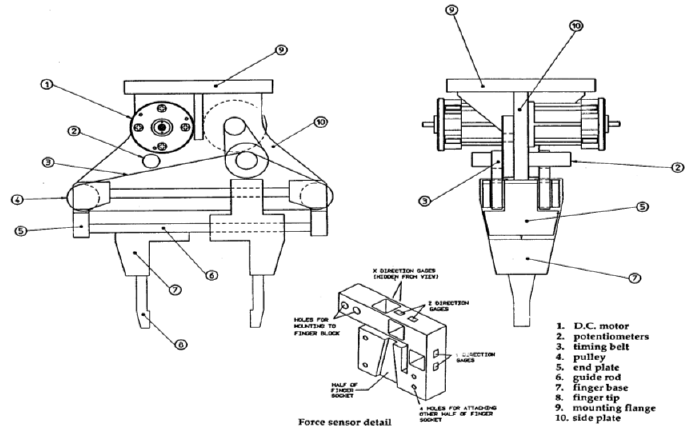
Na slici je skica grippera sa dva prsta, pokazujući raspored senzora, kontaktne površine i sile. Signal sa senzora ide u kontroler koji reguliše motor i ispravlja silu hvatanja u realnom vremenu.
Prsti hvataljke – mehanički prsti koji pružaju kontakt sa objektom
Taktilna senzorska matrica – smeštena na unutrašnjim površinama prstiju za merenje sile normalne na dodir i tangencijalne sile klizanja
Signalne žice – prenose električne signale senzora ka kontrolnoj jedinici
Mikrokontroler – obrađuje signal iz senzora i šalje povratnu informaciju kontroleru robota
Povratna petlja – omogućava real‑time podešavanje sile stezanja kako bi se izbeglo klizanje ili stezanje više od potrebnog
Alat (end-effector) – primer hvataljke pomoću koje se objekat podiže ili postavlja
End-effector dizajn definiše mehaničku mogućnost primene sile.
Senzor u hvataljci meri stvarnu primenjenu silu — signal se koristi za closed-loop kontrolu za održavanje optimalne sile.
Ovaj tandem omogućava sigurno i precizno rukovanje dragocenim ili krhkim predmetima, kao što smo već pomenuli kada smo govorili o sili stezanja u odeljku senzora.