Servoupravljanje (eng. servo control) je metod upravljanja koji omogućava precizno pozicioniranje i kontrolu kretanja robota koristeći povratnu spregu (eng. Feedback) duž cele putanje vrha izvršnog uredjaja. Cilj je održavanje željene pozicije, brzine ili sile pomoću senzorskih podataka.
Senzori – Merne komponente koje prate poziciju, brzinu i ubrzanje (npr. enkoderi, tahometri, potenciometri).
Aktuatori – Pogonski elementi (motori ili hidraulični cilindri) koji omogućavaju kretanje robota.
Kontroler – Elektronska komponenta koja obrađuje podatke iz senzora i upravlja aktuatorima.
Referentni signal – Poželjna pozicija, brzina ili sila koju sistem treba da postigne.
Greška – Razlika između referentnog i stvarnog signala, koja se koristi za korekciju.
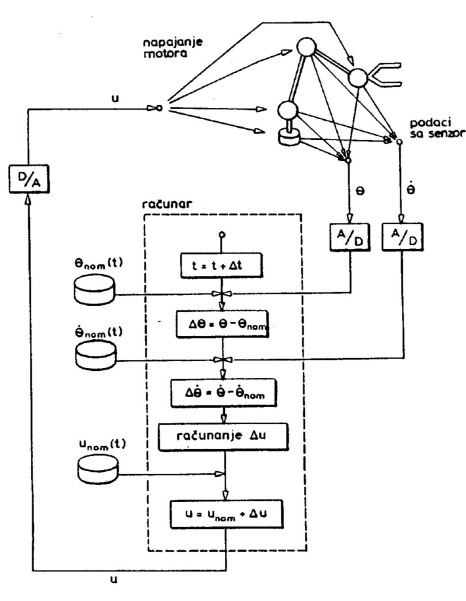
Robot započinje kretanje sa referentnim signalom (brzina i pozicioniranje).
Tokom kretanja, senzor šalje informacije kontroleru o trenutnoj poziciji, orjentaciji i brzini
Kontroler upoređuje trenutnu vrednost (dobijenu od senzora) sa željenom vrednošću.
Na osnovu razlike (greške), sistem generiše odgovarajući signal za upravljanje aktuatorom.
Proces se stalno ponavlja dok greška ne postane zanemarljiva (blizu nule).
Položajno servoupravljanje – Koristi se za precizno pozicioniranje vrha robota.
Primer: Kontrola položaja robotske ruke.
Brzinsko servoupravljanje – Fokusira se na kontrolu brzine.
Primer: Kretanje transportera u robotskoj ćeliji.
Sila/obrtni moment servoupravljanje – Reguliše silu ili moment koji robot primenjuje.
Primer: Kontrola pritiska prilikom montaže delova.
Velika preciznost i stabilnost.
Pogodno za složene zadatke.
Omogućava upotrebu povratne sprege za dinamičko prilagođavanje.
Visoka cena implenetacije (velika količina senzora i složenija upravljačka jedinica zbog dinamičke korekcije vrednosti)
Kada robotska ruka treba da podigne objekat s preciznom koordinacijom, senzori prate tačnu poziciju zgloba. Ako se javi greška u položaju, kontroler šalje signal motorima da koriguju grešku.
Karakteristika |
Servoupravljanje |
Sekvencijalno upravljanje |
|---|---|---|
Povratna sprega |
Da |
Ne |
Preciznost |
Visoka |
Srednja |
Složenost zadatka |
Pogodno za složene zadatke |
Pogodno za ponavljajuće procese |
Kontrolna strategija |
Dinamička korekcija |
Statistički definisana sekvenca |
Servoupravljanje omogućava preciznu kontrolu i prilagođavanje tokom rada, što ga čini idealnim za složene robotske aplikacije.
Sekvencijalno upravljanje se koristi za jednostavnije zadatke sa jasno definisanim redosledom operacija.