
Procesne operacije obuhvataju aktivnosti gde robot direktno menja oblik ili osobine materijala — poput zavarivanja, rezanja, poliranja, nanošenja premaza ili brušenja. Za razliku od manipulacije (samo premeštanja), ovde robot sudeluje u radnom procesu izrade proizvodnog dela.
Tačkasto (spot) ili elektrolučno (arc) zavarivanje — za visoku preciznost i kontinuiran rad.
Često se koristi u automobilskoj industriji kod montaže karoserija i metalnih delova.
Precizna pozicija i kontrola sile žarenja pružaju pouzdan kvalitet spoja
Slika 1: robot sa varilicom tokom zavarivanja
Robotski sistemi prelaze površinu delova, uklanjaju ostatke, obezbeđuju sjaj.
Zahteva kontrolu sile i kontinuitet pokreta da bi se dobio uniforman rezultat.
Slika 2: simultana operacija poliranja u softveru i realno
Robot nanošenjem spreja ili gela boji površine velikih delova precizno i efikasno.
Pruža uniformnu pokrivenost, smanjuje rasipanje materijala i povećava bezbednost.

Slika 3: Roboti za farbanje u auto industriji
Operacija |
Primena |
Uslovi |
|---|---|---|
Zavarivanje |
Metalni delovi, karoserije |
Precizna pozicija, F/T kontrola |
Poliranje |
Metal, plastika |
Stabilna brzina, compliant kontrola |
Painting/coating |
Automobilska tela, industrija |
Uniformna pokrivenost, ventilacija |
Omogućava jednom robotu da obavlja više operacija: npr. zavarivanje, poliranje i paletizacija – svaki sa drugačijim alatom (EOAT).
Štedi vreme i eliminiše ručnu promenu alata tokom proizvodnje ([turn0search1] [turn0search4]).
Idealno za fleksibilne proizvodne linije i agilne primene.
Slika vezana za tool changer prikazuje:
Master ploču montiranu na ruci robota.
Tool ploču koja se montira na EOAT, kao što je zavarivačka glava, gripper ili polir alat.
Zaključavanje (pneumatsko ili mehaničko) koje osigurava čvrstu vezu čak i kod nestanka napajanja.
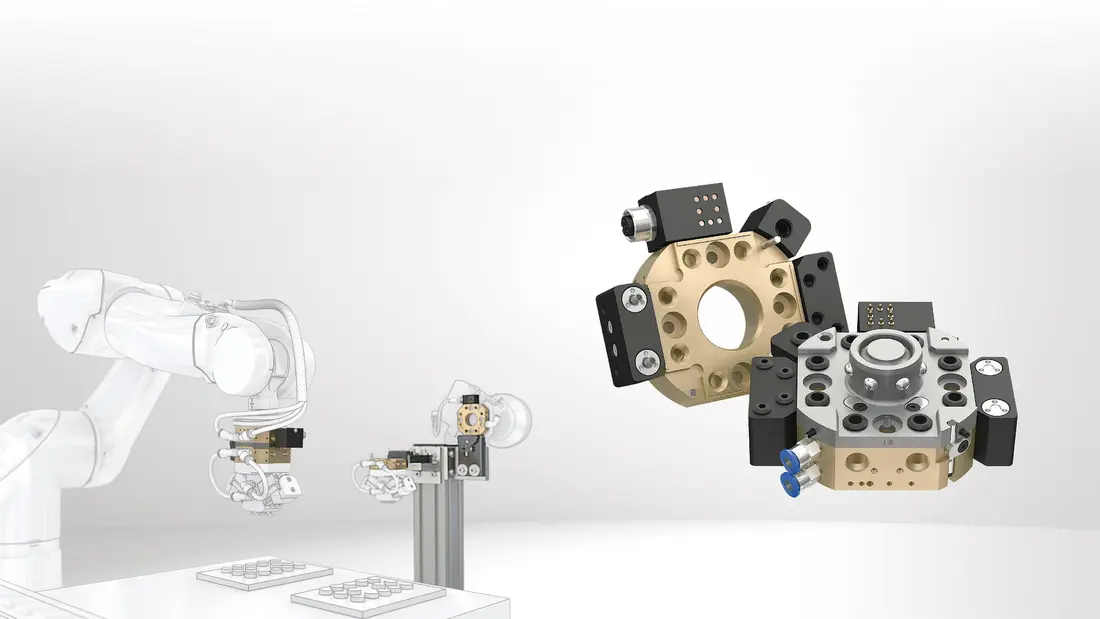
Slika 4: Atomatska izmena alata
Robot dolazi do stanice za izmenu alata.
Aktuelni alat se otpusti (tool plate se odvaja od master).
Robot se pomera i povezuje sa novim alatom na tool stendu.
Pokreće se zaključavanje, i robot dobija potpunu funkcionalnost novog EOAT-a.
Robot nastavlja sledeću operaciju koristeći novi alat.
Zamislimo situaciju:
Robot započinje zavarivanjem koristeći zavarivaču glavu.
Završi zavarivanje i odlazi do tool magazine.
Koristi ATC da zameni zavarivač sa polirnom glavom ili gripperom za paletizaciju.
Sistem vraća greške na glavnu kontrolnu jedinicu, i robot nastavlja sledeću operaciju bez prekida u liniji.
Robotske procesne operacije zahtevaju više od premeštanja — uključuju oblikovanje, obradu i završnu izradu proizvoda.
Svaka operacija ima specifične zahteve u smislu sile, preciznosti, senzora i softvera.
Praktične demonstracije i slike omogućavaju učenicima da direktno povežu teoriju sa industrijskom primenom.