U ovom delu razmotrićemo način i mesto postavljanja motora koji pokreću zglobove robota.
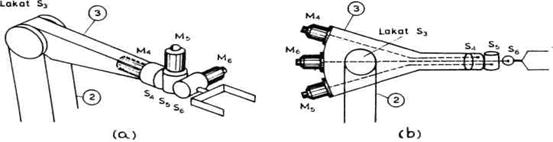
Analizu ćemo početi od zglobova šake. Na slici 1(a) je prikazan treći segment minimalne konfiguracije i segmenti šake i jedan mogući način postavljanja motora. Motori su postavljeni direktno u zglobovima koje pokreću. Motori koji pokreću zglobove S4,S5,S6 označeni su M4,M5,M6. Ovaj način omogućava jednostavnu konstrukciju, međutim, ima dosta nedostataka. Šaka postaje glomazna i to sa jedne strane povećava opterećenje robota, a sa druge strane smanjuje mogućnosti kretanja zglobova šake.
Slika 1. Postavljanje motora za pogon šake
Drugi način, koji je češći, polazi od ideje da motore treba postavljati što bliže osnovi robota jer se tako smanjuje statičko opterećenje. Kada su u pitanju zglobovi šake i motori koji ih pokreću, jedan raspored motora koji sledi ovu ideju prikazan je na slici 1(b). Motori su postavljeni iza lakta i predstavljaju kontratežinu. Pogonski momenti se od motora prenose osovinama do odgovarajućih zglobova.
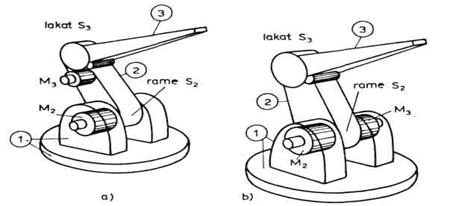
Slika 2. Pogon minimalne konfiguracije
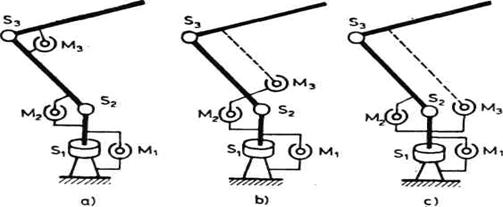
Slika 3. Šematski prikaz lanca robota
Analiziraćemo pogon zglobova minimalne konfiguracije. Razmotrimo prvo zglobove lakta (S3) i ramena (S2). Jedna od mogućnosti je smeštanje motora uz same zglobove kao što je prikazano na slici 2(a). Ovakav pristup pojednostavljuje konstrukciju prenosa pogonskog momenta od motora na zglob. Primetimo da ovde svaki motor deluje između dva susedna segmenta. M3 pokreće zglob S3, i deluje između segmenata 2 i 3 tako što stator vezujemo za segment 2, a rotor preko određenog prenosnog mehanizma za segment 3. Slično važi za motor M2 koji deluje između segmenta 1 i 2. Razmotrićemo još jednu mogućnost. Motori M2 i M3 mogu se postaviti na mesta prikazana na slici 2(b). Za motor M2 koji pokreće rame S2 važi sve što je malopre rečeno, ali pitanje motora M3 je složenije. Ovaj motor pokreće lakat S3. Svojom osovinom rotora, preko prenosnog mehanizma, motor je vezan za segment 3. Stator motora može se vezati na dva različita načina. U prvom slučaju stator vezujemo za segment 2 i time dobijamo da motor M3 deluje između segmenata 2 i 3. Ovaj slučaj je, dakle, po dejstvu motora ekvivalentan načinu prikazanom i opisanom pod (a). Ovo je shematski prikazano na slici 3(b).
U drugom slučaju stator motora M3 vezujemo za segment 1. Tada motor deluje između segmenata 1 i 3. Na ovaj način dobijamo vezu između segmenata koji nisu susedni (slika 3c).
Ostalo je i da razmotrimo zglob S1 tj. obrtanje robota oko vertikalne ose. Taj zglob vezuje segment 1 sa podlogom i motor M1 se uvek vezuje između tih segmenata. Pri tome stator može biti učvršćen na segmentu 1 ili na podlozi.