Kako se formira tok operacija (task planning) za robota.
Na koji način se planira putanja robota kroz prostor (path planning).
Strategije za hvatanje predmeta (grasp planning) i fino pomeranje u ključnim tačkama (fine motion).
Ulogu senzora i povratne sprege u preciznoj manipulaciji.
Planiranje zadataka određuje redosled akcija kao što su:
Pick, Transfer, Wait signal, Place.
U modernim sistemima kombinuje simboličko planiranje i proveru izvodljivosti putanje (poznato kao TAMP — Task & Motion Planning).
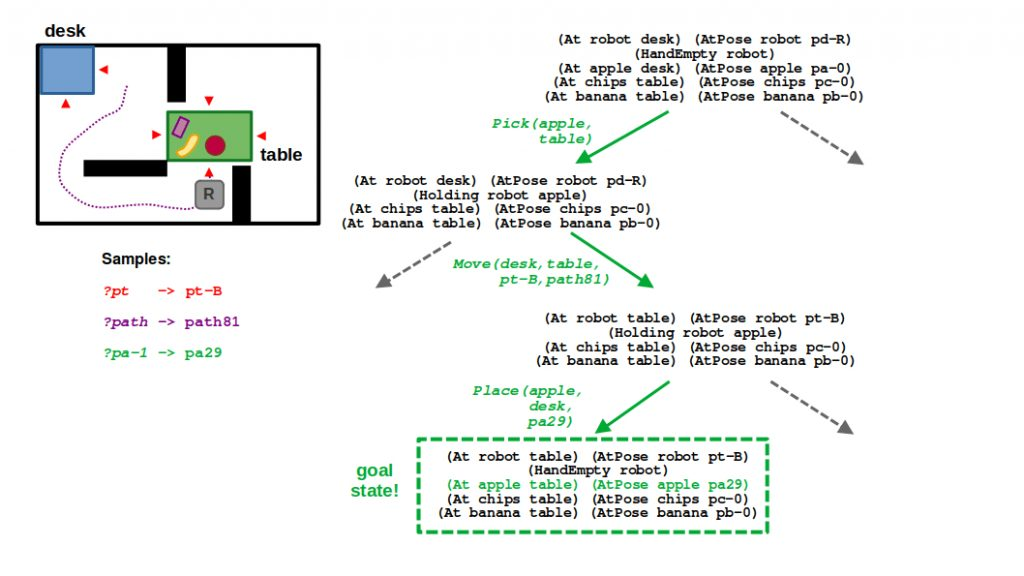
Na slici 1 je prikazano kako su zadaci simbolički definisani i potom izvedeni u geometrijskim putanjama.
Slika 1 ilustracija kategorizacije planova za task planning i motion planning
Path planning kreira konkretne putanje u prostoru robota koje izbegavaju sudare i optimizuju vreme ili energiju.
Korišćeni algoritmi uključuju RRT, RRT* sa kasnijim izravnavanjem (smoothing) putanje Robotics KnowledgebaseRobohub.
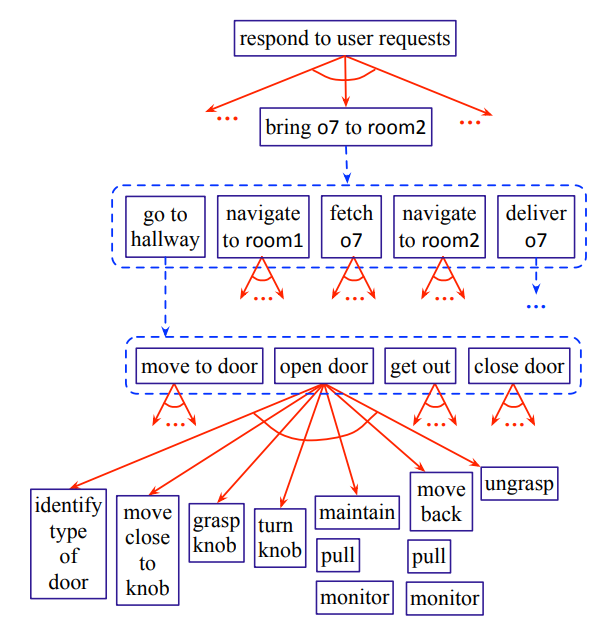
Slika 2 . prikazuje simbolički tok TAMP — kako task plan pokreće generisanje putanje i vraća se nazad ako path plan nije izvodljiv.

Slika 3. ilustracija algoritma RRT sa predloženom i optimalizovanom putanjom i alternativnim graničenjima. Koristi se za razumevanje kako robot bira između više putanja.
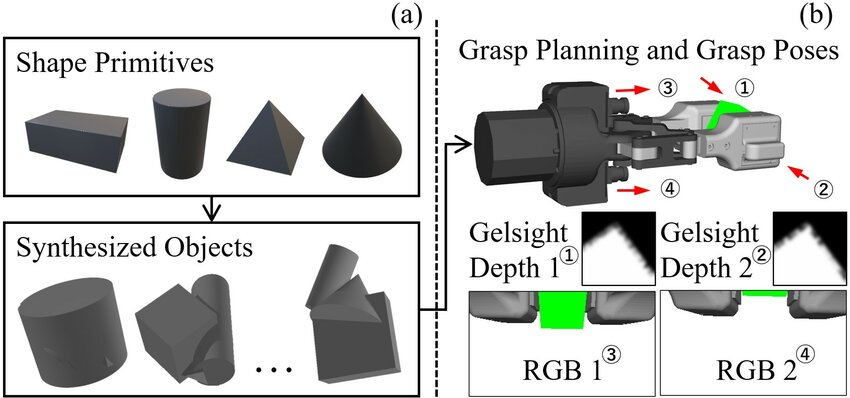
Grasp planning definiše položaj i orijentaciju hvataljke (EOAT) za stabilan grip, uz kriterijume poput force closure ili task-specific grasping -- izbor najboljeg hvata prema tipu predmeta i zadatku MDPI.
Fine motion se primenjuje neposredno pre hvatanja (pre-grasp faza), koristi senzore kao što su taktilni moduli ili kamere (vizuelna servo kontrola) da bi se precizno prilagodilo položaj TCP-a MDPIMDPI.
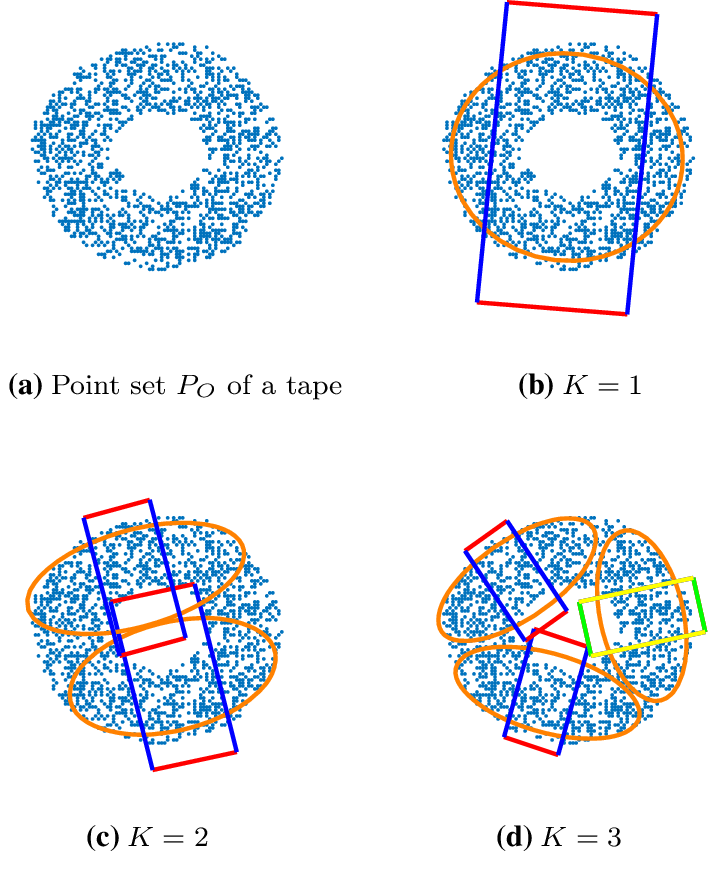
Slika 4: generisanje kontaktnih tačaka i površina
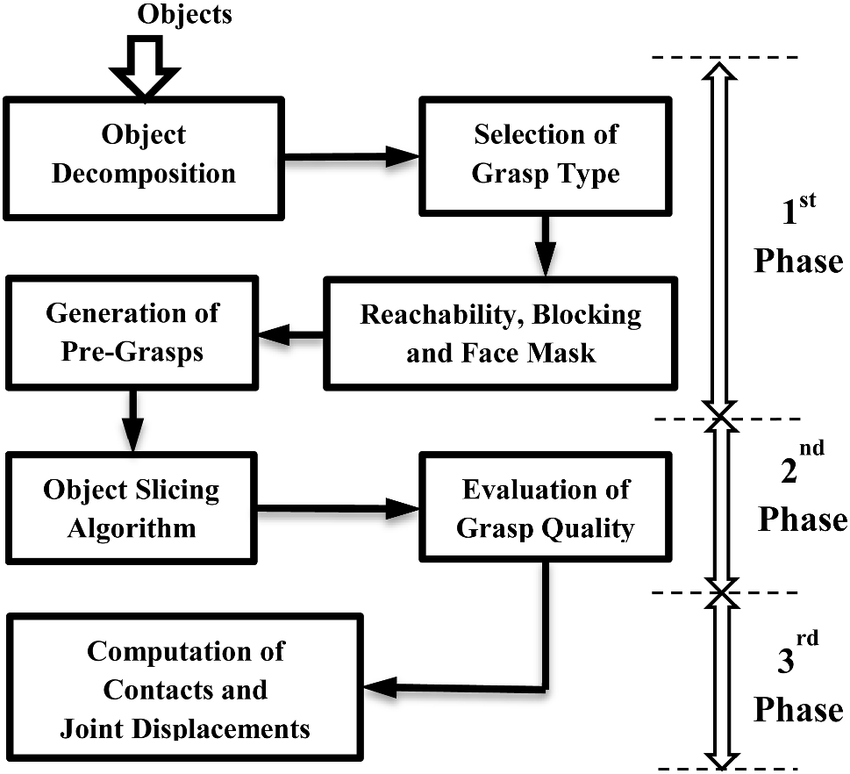
Slika 5: blok dijagram strategije hvatanja
Slika 6: pre-grasp i motion plan
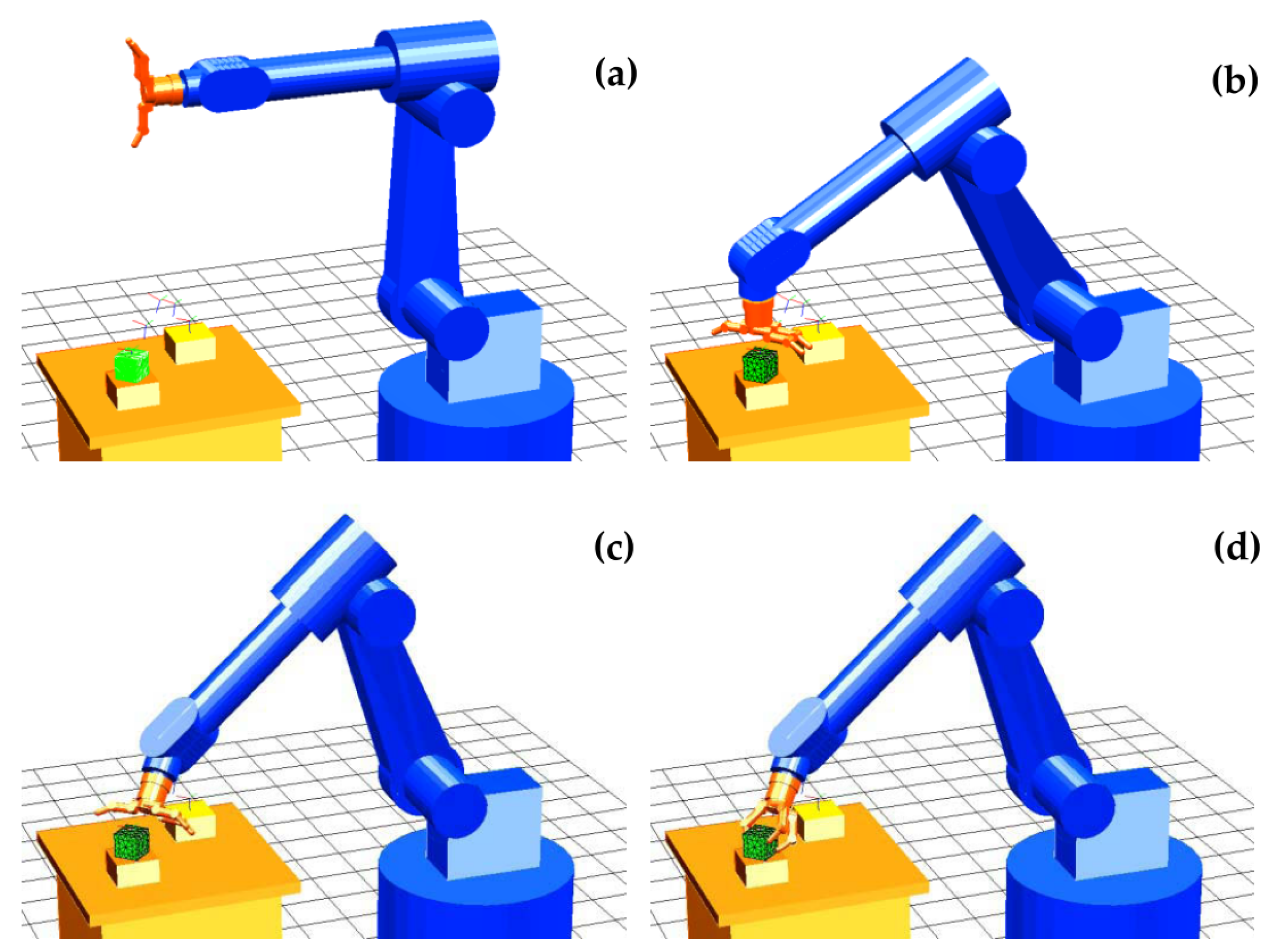
Slika 6: pick-and-place operacija po fazama
Grasp planning definiše gde i kako robot treba da uhvati predmet—izbor položaja i orijentacije EOAT-a koji garantuje stabilan grip.
Algoritmi prethodno analiziraju geometriju objekta (point cloud, površinske krive), identifikuju kontaktne tačke, proveravaju force-closure i izbegavaju kolizije ([turn0search4]).
Prikazuje proces generisanja kandidata za grip: izbor kontakta i površinsko modeliranje objekta, provera stabilnosti hvata (candidate grasps).
Svaka opcija se analizira prema kriterijumima poput distance, tolerancije, orientacije i sigurnosti.
Pre‑grasp faza je faza približavanja hvataljke objektu – u kojoj robot približava TCP-u do početne pozicije gripovanja.
Fine motion se javlja neposredno pre samog hvatanja; koristi se vizuelna ili taktilna povratna sprega radi korekcije pozicije i sile hvata ([turn0search2]).
Blok dijagram toka pre-grasp strategije: uključuje korake kao što su pose estimation, contact region definition, grasp candidate generation, collision check, i selekciju optimalnog hvata.
Ilustruje tok pre-grasp + motion plan: robot ruka se kreće kroz niz konfiguracija da bi došla do stabilne pozicije za hvatanje objekta.
Primer robota koji izvodi pick-and-place operaciju sa konkretnim koracima:
Približavanje (reach) →
Precizna fine pozicija (orientation) →
Grip →
Podizanje i prenošenje objekta.
Očigledno se vidi optimalna putanja TCP–a kroz pre-grasp, hvatanje i liftoff faze.
Vision sensors (RGB-D, 2D/3D kamere) omogućavaju robota da prepozna položaj predmeta i planira hvatanje u realnom vremenu. Dubinski senzori posebno su korisni za grabe planiranje tekstureless objekata u skladištu.
Taktilni i force/torque senzori omogućavaju robotu da prilagodi silu hvata i izbegne greške kod gripovanja neizvesno pozicioniranih predmeta.
Planiranje zadataka organizuje šta robot radi u kojem redosledu.
Planiranje puta omogućava robota da se kreće kroz prostor bez sudara i optimalno.
Grasp planning i fine motion omogućavaju pouzdan i precizan grip.
Senzorska povratna sprega čini planiranje robusnim i prilagodljivim promenama u realnom okruženju.