Neuronske mreže (NN) omogućavaju robotima da uče iz podataka, prepoznaju obrasce i adaptivno donose odluke u realnom vremenu — što je ključno za savremenu robotiku i automatizaciju.
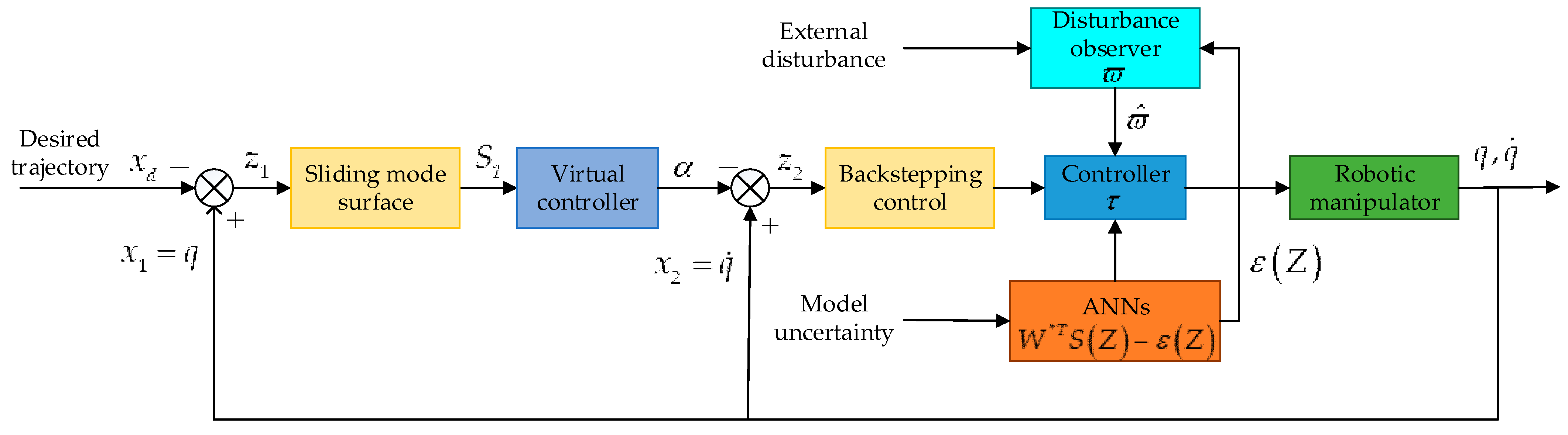
Slika 1 Blok dijagram neuronske kontrole
Prikazan
je blok-dijagram neuronske
kontrole: senzorski
podaci (pozicija, greška) ulaze u NN, koji generiše izlazne komande
motorima robota. Mreža nadoknađuje nepoznate dinamike i omogućava
precizniju kontrolu.
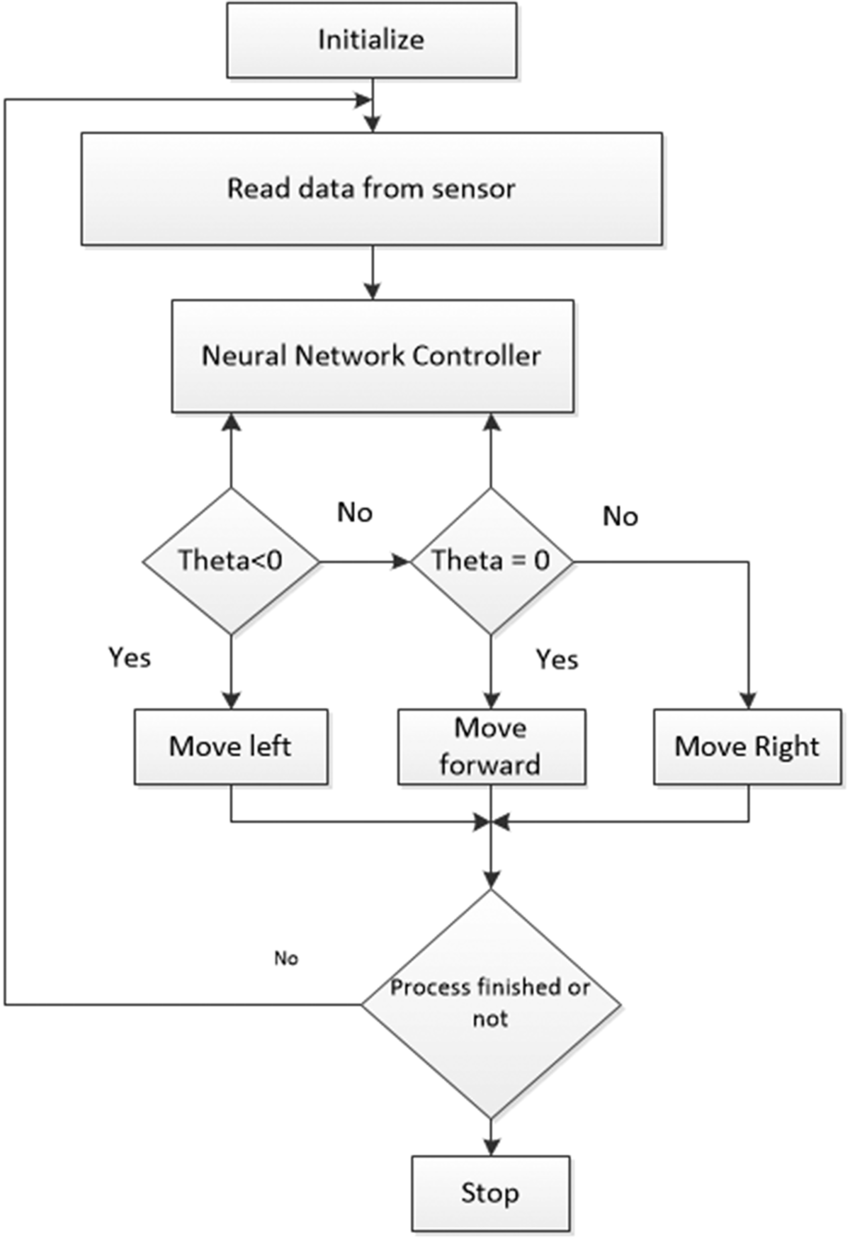
Slika 2 Struktura sloja neurona i petlja povratne veze
Ilustruje princip ILC
integracije s NN: robot ponavlja zadatu trajektoriju, meri razliku
između željene i ostvarene putanje, i prilagođava kontrolne
signale — informacija se koristi za obučavanje mreže koja
smanjuje grešku pri narednom pokušaju.
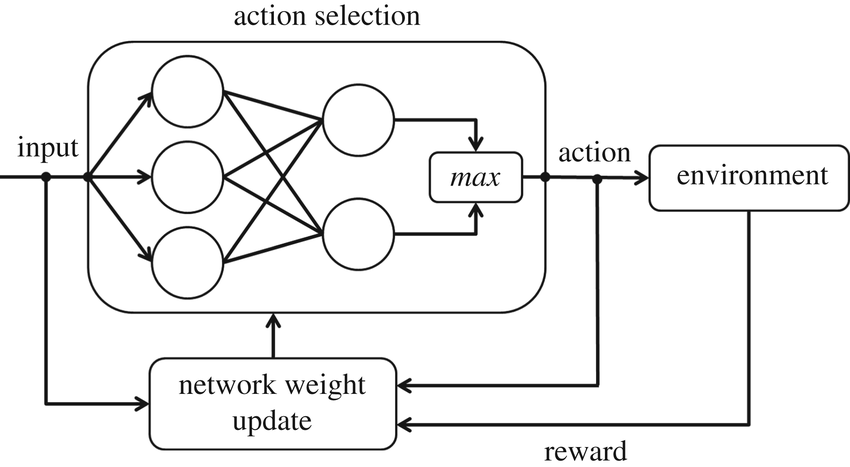
Slika 3 Duboko učenje sa pojačanjem
Ulaz (input) ide u
neuronsku mrežu (action selection),
Iz mreže se bira akcija (max operator),
Akcija se šalje u okruženje (environment),
Na osnovu povratne informacije (reward) vrši se ažuriranje težina mreže (network weight update).
Tako se ciklus učenja ponavlja dok agent ne nauči optimalnu politiku.
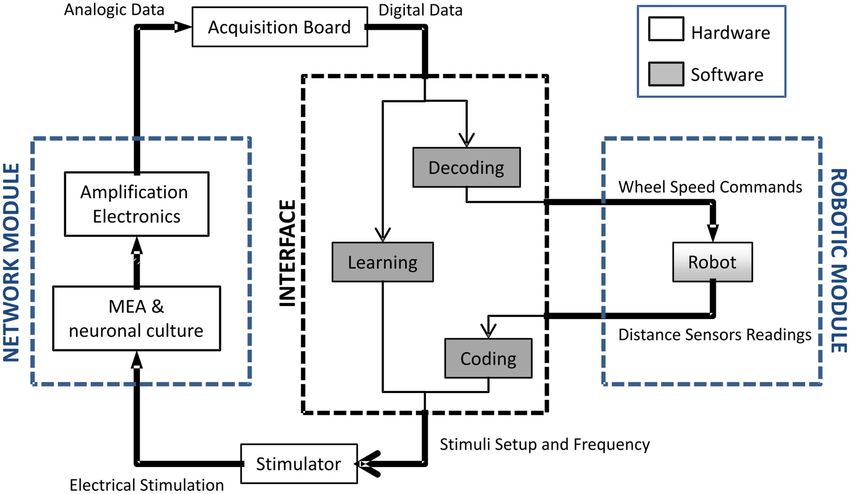
Slika 4 Neuro-robotska arhitektura
Prikazuje
sistem gde neuronska mreža kombinuje informacije sa vizuelnih
senzora (npr. RGB kamere) za adaptivno pozicioniranje i hvatanje
objekata — korigujući pokrete u realnom trenutku.
NN kontroler omogućava adaptivnu kontrolu i praćenje u dinamičnim sistemima.
ILC model koristi učenje iz ponovljenih grešaka za poboljšanje preciznosti.
RL omogućava robotu da uči optimalne sekvence kroz nagrade i kazne.
Vizuelno vođena NN kontrola čini gripanje i kretanje robota preciznim čak i u promenljivim uslovima.